| CATEGORII DOCUMENTE |
| Bulgara | Ceha slovaca | Croata | Engleza | Estona | Finlandeza | Franceza |
| Germana | Italiana | Letona | Lituaniana | Maghiara | Olandeza | Poloneza |
| Sarba | Slovena | Spaniola | Suedeza | Turca | Ucraineana |
AC motors consist of a stator and a rotor.
The stator windings are stationary. When an AC voltage is applied to the stator, a magnetic field is produced. The sinusoidal nature of AC combined with the arrangement of the stator windings means that the magnetic field of the stator rotates.
The rotor is a winding supported by bearings and is free to rotate.
AC motors are designed to be powered from either single-phase or poly-phase AC.
The two types of AC motor are the induction motor and the synchronous motor.
Any conductor placed in a changing magnetic field will have a current induced in it.
When the stator windings are energized with AC, a rotating magnetic field is developed. The rotation speed of this field depends upon the frequency of the supply voltage and the arrangement of the stator windings. This rotating field interacts with the rotor windings and current is induced in the rotor. The induced rotor current creates a new magnetic field. This rotor field tries to line up with the stator field and so the rotor rotates, continually chasing the moving field of the stator winding.
For a current to be induced in the rotor winding, the relative strength of the stator magnetic field must be constantly changing. For this to occur the rotor must turn slower than the rotating stator field. The difference in rotation speeds is called slip. Different induction motors have different amounts of slip. Small electric motors are higher in slip and less frequent than larger motors with lower slip.
The most common type of induction motor is the squirrel cage motor. The rotor conductors are bars of aluminium or copper, separated by a ferromagnetic core. The advantages of the squirrel cage motor are its simplicity, low maintenance, reliability, rapid acceleration to full speed and availability.
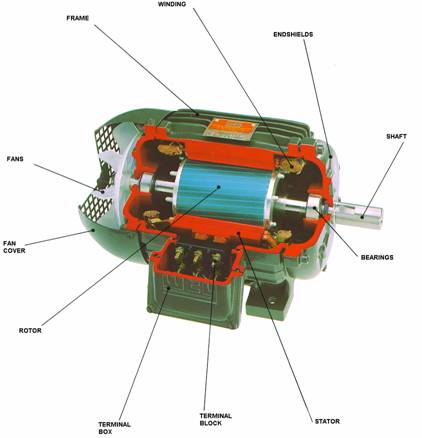
Fig. 26 Cutaway of induction motor
Fig. 27 Speed - Torque relationship of an Induction Motor
Another type of induction motor is the split-phase motor. This is a single phase motor. Its stator consists of two windings joined by a capacitor. Such an arrangement allows the motor to be reversed by simply swapping the polarity of the supply windings.
In a synchronous motor, the rotor winding is energized with DC. The magnetic fields of the rotor and the stator interact and try to line up. The rotor rotates at a speed determined by the frequency of the supply current and the arrangement of the stator windings.
Fig. 28 Cutaway of synchronous motor
Fig. 29 Speed - Torque relationship of a Synchronous Motor
A synchronous motor needs help to start. An extra starting winding is used to start the rotor turning. This starting winding is similar to the rotor winding in a squirrel cage motor.
Synchronous motors are used in large, slow-speed machines running at constant speeds. If several motors have to be run at exactly the same speed, synchronous motors could be used.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3326
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved